Those Damned Wobbly Suitcases
Created/Modified: 2014-03-31/2014-03-31
This starts off talking about suitcases and winds up being about one of the most general and important phenomenon in physics: simple harmonic motion (SHM). SHM is motion that is driven by a force that is proportional to the displacement of some part of a system from its equilibirium position, like the bob of a pendulum. When the pendulum is hanging straight down, everything is in balance (or equilibrium, as we like to say beause why use a fifty cent word when you've got a five dollar one lying around?). When everything is in balance, nothing moves. When nothing moves, life is boring.
If we pull the pendulum bob to one side and let it go, the system swings back and forth. This is simple harmonic motion. Why "harmonic"? Because it turns out the system oscilates with a pure frequency and a single phase. This isn't necessarily the case: there are similar motions that involve multiple frequencies and phases. That's a topic for another time.
And why "simple"? Because the other common case, which I'll get to in a bit, is "damped harmonic motion" (DHM). DHM includes friction (damping) which brings the motion slowly to a halt. SHM is frictionless, which is a convenient fiction that lets us deal with a lot of practical cases where friction is small. By setting it to zero the equations get easier to solve, although thanks to modern computers it is almost as easy these days to deal with DHM as SHM. There is also "driven harmonic motion", where there is some mechanism that gives the system a poke every now and then to overcome damping. The general case of "damped, driven, harmonic motion" (DDHM) is beyond the scope of my analysis here, at least for now.
The Problem That Got Me Thinking
I was using a little hand-truck to move some stuff and it did that characteristic dance that such things do. Wheeled suitcases do the same thing: take them over the smallest bump and they start to wobble uncontrollably, dancing from side to side until they fall over, or you stop moving and let them settle down.
Rolling it along a rough sidewalk made this problem a lot worse, and being in the rain made me want to walk even faster than usual. So it was a pain, and it got me to thinking what the cause is. It isn't obvious, and it particularly isn't obvious why the motion is so damned aggressive. Even walking backward with both hands on the handle it was difficult to control.
What do you think causes this? Feel free to use your imagination on the problem, and imagine a solution using your imaginary analysis. What do you think would reduce this motion? Why does it seem so violent and difficult to control?
Me, my imagination is useless for that kind of analysis, so instead I use ideas that have been tested by systematic observation and controlled experiment. In this case, the idea is the Free Body Diagram (FBD), which replaces all the materials around the object of interest with the forces they exert, and then puts mathematical constraints on those forces such that they reproduce the physical constraints on the object.
FBD analysis is one of the most basic tools in a physicist's toolbox. Remember that question people were talking about some years ago about a plane taking off on a conveyor belt? Drawing a FBD solves it without any fuss or bother. Talking about it using our imagination and intuition leads to a lot of heat and not much light. Which makes me wonder exactly why people keep talking about problems using thier intuition and imagination as if that will solve anything, when it never has in the past.
In any case, the FBD for this problem is shown below:

There are four forces involved: the (small) upward force from the person's hand (Fh), the downward force of gravity (mg) and the upward forces from the wheels (Wl and Wr).
Since the suitcase neither leaps into the air nor plunges to the centre of the Earth, we can put the constraint on these forces that:
mg - Fh - Wl - Wr = 0
We know that Fh is relatively small and constant (we aren't putting much effort into holding the suitcase up... that's the whole point), so we can treat it as zero and see that the weight (mg) must be about equal to the sum of the forces on the wheels:
mg ~ Wl + Wr
Now, when both wheels are on the ground, the weight will be distributed pretty much evenly (Wl ~ Wr) and the torque on the suitcase will be small.
However, suitcase frames are pretty stiff, which means that if we hit a bump, even a little one, we generally lift one of the wheels--say the left one--off the ground. But again, the suitcase doesn't immediately plunge to the centre of the Earth, so the net force must still be pretty much zero. But that means that the force on the right wheel must more-or-less double!
That's where the torque is coming from. Suddenly there is zero upward force on one side and twice the upward force on the other. That's enough to drive the left wheel back down hard, jumping the right wheel off the ground and suddenly reversing the torque. No wonder the wobble is so hard to damp: it's being driven by the whole weight of the suitcase!
As each wheel comes off the ground, the other wheel has to support the whole weight, creating a torque that alternates from side-to-side, making the wobbles bigger and bigger.
Note that putting the wheels farther apart won't help this, except insofar as it adds a little flexibility to the frame. If the frame bends, then the torque will be lower, at least for smaller bumps.
What would help is adding springs to the wheels, or making the frame between the wheels much more springy, or putting the wheels on a separate bar that had a single pivot point in the middle attaching it to the suitcase, or making the wheels out of something squishy so they act as springs themselves, or replacing the two wheels with a single central one or a short roller (which would still have to be squishy or springy) or moving the wheels much closer together and adding a soft (inelastic) rubber nub to each corner of the suitcase.
There are likely other solutions as well, but only by analyzing the problem correctly and understanding the cause of the motion can we begin to imagine solutions that might help. If we instead make the mistake of using our imagination to invent the cause of the problem, we are very unlikely to get anywhere. To contend otherwise is to be left wondering why the industrial revolution got going 50 years after Newton, not 5000 years before him.
To understand the problem more deeply, it's necessary to represent it more formally.
Simple Harmonic Motion
It's curious that popular science articles are happy to discuss black holes and warped space and holograms on the brane, but they never mention simple harmonic oscillators (SHOs) or simple harmonic motion (SHM).
SHM is the cornerstone of physics. The goal of any physicist when first confronted with a problem is to figure out how to turn it into an SHM problem, where "motion" is understood inclusively: it can apply to mechanical or electrical or fluid or completely abstract oscillations.
Consider a system that is in equilibrium, so given the positions of its components nothing has any force acting on it. I am in equilibrium with my chair right now: the spring force of the cushion acting on me is equal to the gravitational force of me acting on it. Furthermore, my equilibrium is stable. If the cat jumps on my lap (oof) I press down on the cushion a little more and it compresses a bit, increasing its opposing force so neither the cat nor I plunge through the substance of the chair toward the centre of the Earth. Likewise, if the cat jumps off, I bounce up a little and the cushion decompresses, reducing the force it supplies so I don't go flying toward the ceiling.
SHM is occurs whenever we have a restoring force that is more-or-less proportional to the displacement of the system from its equilibrium position. "More-or-less" is a pretty elastic term here, because to first order everything is a simple proportionality: the force is just the displacement multiplied by a (negative) constant. The negative sign is important because it ensures the force is restoring... otherwise the system is in unstable equilibrium and really will go flying off in all directions when perturbed.
For the wheeled suitcase example, the restoring force is due to all the weight being transferred onto a single wheel due to the least little bump in the road. This is about as non-linear as you can get, which makes it a nice illustration of how a tool like SHM can be used to think about and understand systems that are only very approximately fulfill the conditions that nominally create it.
SHM is a direct consequence of Newton's 2nd Law: F = m*a or more causally, a = F/m (the acceleration of an object is equal to the force on it divided by its mass.)
Acceleration is the rate of change of velocity with time: a = dv/dt, where "d" refers to an infinitesimally small increment (the continuous version of δ). And velocity is the rate of change in position (x): v = dx/dt, which means a = d(dx/dt)/dt = d2x/dt2 (the latter expression is just a notational simplification, like so much math.)
The equation that governs SHM is, from Newton's 2nd Law:
F = -k*x
where k is the "force constant": it just gives the proportionality between the displacement (x) and the force. The negative sign is a convenience, to remind us that the force is restoring, and in this formulation k is a positive number. Physicists spend an astonishing amount of time worrying about dropped negative signs: I once worked on an experiment whose original designer--a very careful and clever guy--had dropped a negative sign which resulted in an important background term cancelling out instead of adding up, which meant that by the time I joined the team they had been collecting data for two years that was almost all background events. The geometry meant the background looked the same as the real phenomenon, and the absolute rate calculation was very difficult to do, making it hard to identify the issue. My contribution was an independent calculation of the relative and absolute rates, which revealed the issue and forced us to substantially redesign the experiment.
Re-writing this equation in terms of acceleration:
m*a = -k*x
or:
d2x/dt2 = -(k/m)*x
This is the fundamental equation of simple, undamped harmonic motion. For most interesting cases there is also a damping term that is proportional to velocity, representing the effects of friction:
d2x/dt2 + (β/m)*dx/dt = -(k/m)*x
The damping term will become interesting in a bit.
In the meantime, how is this equation supposed to apply to the suitcase example, where the force term is a step function, traditionally represented by Θ(x), rather than a linear function of the displacement? What I'm interested in doing here is figuring out the characteristic frequency so that I can figure out a damping term that will tend to kill the motion.
For the simple equation, the solution is:
x(t) = A*exp(i*sqrt(k/m))
As is typical of differential equations, we don't solve them in any algebraic sense, we rather figure out the important constraints on the solution and use our (hopefully extensive) pre-existing knowledge of various functions to find one that fulfills those constraints. In this case, the equation can be restated as the constraint that the second derivative is equal to a negative constant multiplied by the function, which means that the function must be its own second derivative. That means we are looking at exponentials and sin/cosine functions, as they are the only ones we know of that fulfill that constraint. Because the constant is negative we have to have a complex exponential, which is where the factor i = sqrt(-1) comes in.
The amplitude of the oscillation (A) drops out of the equation, although in the general case of the damped, driven harmonic oscillator it will also be a function of time.
The (angular) frequency of the oscillation is sqrt(k/m), so again: in the case of a step function, what is a "reasonable" estimate for k? And for that matter, since we are considering a rotating system we really need to be thinking in terms of I (the moment of inertia) and the angular displacement α, rather than the mass and linear displacement, but the functional forms are all the same. And we should be talking about torques rather than forces:
α(t) = A*exp(i*sqrt(k/I))
If we assume the amplitude of the motion is fixed, then letting the average torque equal the true torque at half displacement seems like a reasonable thing to do. The true torque with one wheel on the ground for the suitcase is:
T0 = m*g*L/2
where L is the distance between the wheels. With an amplitude of A0 and the true torque reached at half the amplitude, this gives:
k*A0 = m*g*L
so:
k = m*g*L/A0
and the angular frequency of the motion is:
ω = sqrt(m*g*L/(I*A0))
and I = m*(h2+w2)/12
where h and w are the width and height of the suitcase, as we are assuming the motion is basically about the normal to the depth (the suitcase is approximately upright).
Ergo:
ω = sqrt(12*g*L/((h2+w2)*A0))
And to simplify further, we'll assume h = 2*w (a reasonable approximation for most wheeled suitcases), so:
ω = sqrt(12*g*L/((5*w2)*A0))
If the wheels are the full width of the suitcase apart (as is typical) we get:
ω ~ sqrt(12*g/(5*L*A0))
For an amplitude of half a radian (~30 degrees) and L = 0.4 m we get:
ω ~ sqrt(12*10/(5*0.4/2)) = 10 s-1 or about 1.6 Hz, which is not insanely wrong (originally I managed to forget the square root, and so my answer was badly off). The correct answer (from observation) is about 1 Hz, and in fact modelling the system gives 1.4 Hz.
This is the great thing about science: you can generally tell when you've screwed up, and more to the point, so can everyone else. This makes science challenging, especially for people who hate to be wrong, which is at least a tendency most of us have. Cultivating the discipline to accept being wrong with equanimity is an important part of a scientist's education. Ideally, scientists automatically look for multiple independent ways of measuring the same thing, because that is the only way we know of catching our own errors. This is important because we fully expect that most of what we do will be in error, and we'd much rather catch it ourselves than let someone else catch it for us.
And here's the thing about simple harmonic motion:
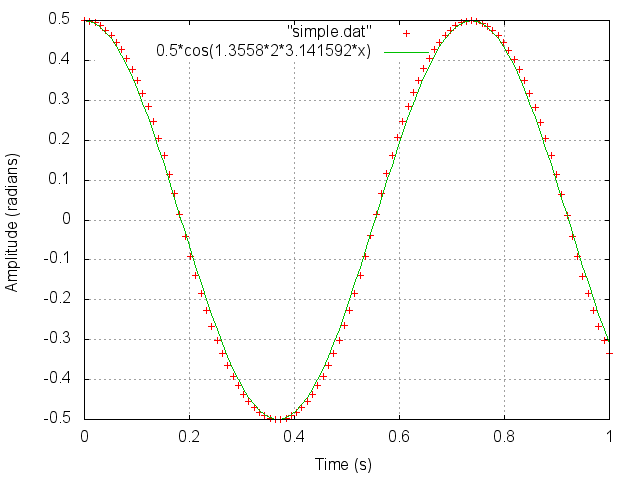
The green line is a cosine function, fitted to match the output of the differential equation solver (which is a 4th order Runge-Kutta solver, as that is almost always the right choice for an 2nd order ordinary differential equation.) The actual motion, with the torque set to a constant value that changes sign to always oppose the displacement, is shown by the red crosses. Despite F0*2*(Θ(x)-0.5) being a lousy approximation to -k*x, you can see that the modeled motion and the simple harmonic motion are remarkably close to each other.
This is why physicists love SHM: it is almost always a useful first approximation, and it puts us on familiar ground, which is always a good place to be when you are rummaging around in the unknown.
So now that I have some kind of reasonable understanding of the motion, what to do about it..?
Damped Harmonic Motion
The rocking suitcase demonstrates something tolerably close to simple harmonic motion (SHM) even though the forcing acting on it is a step-function that changes sign at zero, rather than a linear ramp.
The frequency of the motion is amplitude-dependent, with the relation:
ω ~ sqrt(12*g/(5*L*A0))
where A0 is the amplitude in radians, L is the width of the wheels and the suitcase (assumed to be the same) and g is a well-known constant.
For a rotational simple harmonic oscillator the characteristic frequency is:
ω = sqrt(k/I)
where k is the torsion constant (the proportionality constant between the angular displacement and the restoring torque) and I is the moment of inertia about the centre of rotation. We can use this to get an "effective k" from measurement or simulation of the rocking suitcase. Otherwise, from the simple theory, the effective k is:
k = m*g*L/A0
For DHM, there is a condition known as "critical damping" in which the system returns to equilibrium as rapidly as possible. Less than critical damping and things oscillate for a while before settling down. More than critical damping and things come back to equilibrium on a slower, longer curve.
This is important because damping is k-dependent, and in particular, critical damping is k-dependent. Knowing the effective k from the above equation is going to let us figure out what the optimal damping constant is.
The condition for critical damping is:
c/(2*sqrt(k*I)) = 1
where c is the damping force coefficient and k and I are defined as above. The constant c relates velocity or angular velocity to force or torque: it is a feature of damping forces that they are proportional to velocity. This has the nice consequence that damping can never drive motion, because once something is stationary the velocity-proportional damping force is strictly zero. Not having things spontaneously go tearing off in the direction of Toronto is considered a good thing in a mathematical model of physical reality, since such things occur very rarely in nature.
The value c/(2*sqrt(k*I)) is called the "damping ratio" and usually given the symbol ζ (Greek letter zeta). There is a rich convention of notation in physics, with Greek letters being used for angular qualities (α for angles, ω for angular frequencies, etc) and particular concepts within specific fields. It is not uncommon to see the letter take over as the name of the concept, as in the "plasma β" for the charged-fluid analog of pressure, for example.
If ζ is less than one the system is under-damped, and it is over-damped if ζ is greater than one. Based on the simple theory, we get a critically-damped c-value of:
c = 2*sqrt(12*g/(5*L*A0))
which gives us a damping coefficient of around 21 N*s/radian for half a radian motion. Plugging this into the equations of motion, we get the following result:
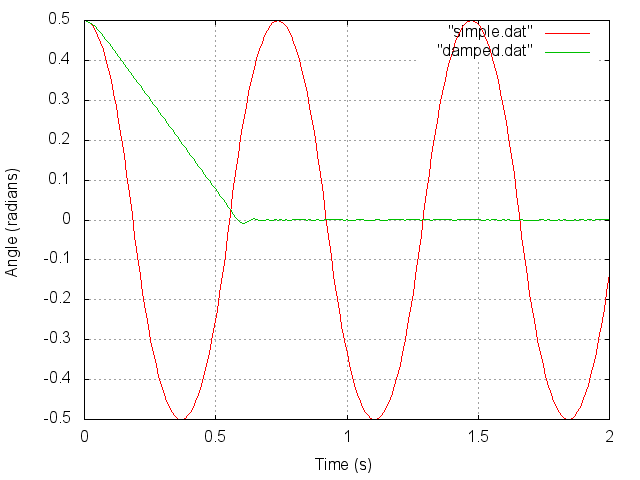
Once again the value of SHM as a model for things that aren't necessarily very close to the underlying assumptions becomes apparent. I've based the damping coefficient on a ridiculously simple approximation to the actual case, and yet it results in something that is remarkably close to critically damped motion, with a tiny over-shoot. The weirdly linear shape of the ramp is presumably due to the constant force law interacting with the damping force.
The question remains, then: how does one implement, physically, the damping described by the equation above? This is where physics shades into engineering. Physics and engineering involve very different kinds of creativity. The former requires that we figure out what laws are operative (sometimes inventing new laws in the process) and sometimes invent new ways of applying them. Physics in the "normal science" case tells us what will happen if we create configuration X.
Engineering, in contrast, is about coming up with configurations such that they are described by the equations physics gives us. What physical system will result in a damping coefficient that scales like the reciprocal of the square root of the amplitude of the motion? I have a couple of ideas, but they are more about intuition than anything else, and will no-doubt require some empirical testing to validate, disprove, or improve.
The important thing is that we have a fair idea of the damping required, and a good idea of the scaling law that describes the damping. How significant the latter is remains an open question: maybe a constant, small damping force coefficient will be enough to prevent things from ever getting large. Maybe there is a characteristic scale to the driving impulses (the size of the bumps wheeled suitcases hit and the speed they are traveling) that is such that a constant damping force coefficient will kill the motion in that regime before it ever has a chance to get large. These are not questions that can be answered without actually gathering some data.
I'm pretty sure I have a board or two with an accelerometer on it. Maybe it's time to instrument a suitcase and visit the airport...